E-News June 2018 Edition
Model Predictive Control for Automotive Systems
 One of the most recent courses developed by ISC and the ACTC for the automotive industry involves model predictive control.
This has been given in various versions to companies such as Toyota in Ann Arbor, Ford in Dearborn, NXP in Glasgow and Chrysler
in Auburn Hills. It was the main theme in a workshop on future directions in advanced control for GM at Warren, Michigan. As
with all ACTC courses a lot of the material involves hands-on simulation experience using either MATLAB or LabVIEW. The design
studies involve all aspects of modelling, simulation and control design, and they include a comparison of different model based
advanced controls.
One of the most recent courses developed by ISC and the ACTC for the automotive industry involves model predictive control.
This has been given in various versions to companies such as Toyota in Ann Arbor, Ford in Dearborn, NXP in Glasgow and Chrysler
in Auburn Hills. It was the main theme in a workshop on future directions in advanced control for GM at Warren, Michigan. As
with all ACTC courses a lot of the material involves hands-on simulation experience using either MATLAB or LabVIEW. The design
studies involve all aspects of modelling, simulation and control design, and they include a comparison of different model based
advanced controls.
The course begins with an introduction to linear model predictive control (MPC), and it covers areas such as cost-function definition, design guidelines and a discussion of stability and robustness issues. The second part of the course then turns to nonlinear predictive control methods to cope with the many nonlinearities in powertrain systems. The observer or Kalman filter is an essential part of the state-space control solutions to the problem and different linear and nonlinear estimation methods are also covered.
The course ends with an overview of new developments in advanced control for automotive systems which provides a perspective on current industry thinking and experience. One of the most popular presentations is that where the different advanced control methods are awarded star ratings for practical value and utility of operation. The experience ISC has built up in 30 years of advanced control applications feeds into these courses. In fact attendees often claim that it is the informal discussions with ISC engineers on their problems that provides the most value from the courses.
The training courses are mostly presented at company premises in Europe and the USA. Further details may be obtained from Dr Meghan McGookin
Mike Grimble
ISC presenting Nonlinear MPC for Marine Renewables at All Energy Conference
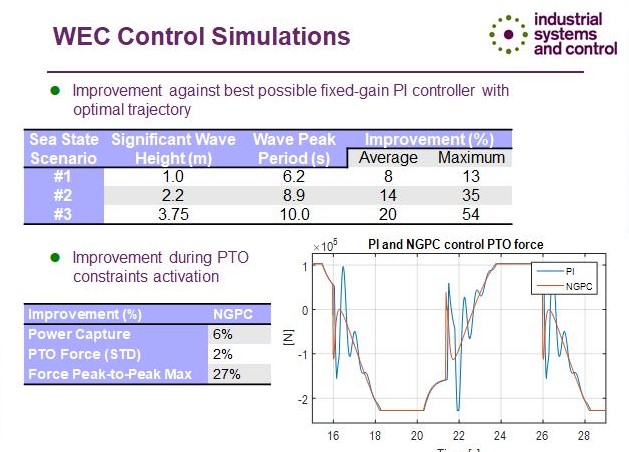
At the All Energy Conference last week, Petros Savvidis presented the results from our recent Wave Energy Scotland funded project on the potential benefits Model Predictive Control can provide for wave energy devices. The key outcome was that an optimal controller that can take into account constraints, can both improve the power captured from the incoming wave and at the same time observe peak load limitations to enhance device survivability to the largest waves. The nonlinear capability of the controller also means that it remains optimally tuned as the prevailing sea conditions change, further maximising power capture. Model-based solutions can also greatly help commissioning and sea-trials as ad-hoc tuning of controllers is removed.
ISC has used nonlinear MPC in other applications (automotive, wind turbines) and we envisage that marine renewables can also take advantage. Please contact us if you would like a copy of the presentation, or visit http://www.isc-ltd.com/industries/marine-renewables.asp .
Matlab Toolbox on NGMV Control
A toolbox has been developed through research programs at the University of Strathclyde and through industrial applications at ISC Ltd., referred to as the NGMV toolbox. The name arose because the original control philosophy for nonlinear systems was called Nonlinear Generalised Minimum Variance (NGMV) control. Since the NGMV controller was developed a whole family of controller's including predictive controllers, robust controllers and even nonlinear estimators have been produced. The toolbox makes the computation of these controllers very straight forward and they are often used for comparison studies in industrial application projects. This toolbox is provided for use in the hands-on studies given in ISC training courses. Anyone interested should contact Dr Meghan McGookin
Forthcoming ISC Training Courses
11th & 12th Sept 2018
System Identification
20th & 21st Nov 2018
Optimisation and Model Predictive Control for Linear Systems
If you would like further details or to register interest on any of these courses please contact Dr Meghan McGookin.
Predictive Control Using Production Engines for GM
Over the last few years there has been strong interest from the automotive industry in model based control methods. There have been many University projects and industrial research projects to investigate the benefits but it has now been reported that a model based predictive control algorithm has been developed successfully with GM for engine control. The approach utilises a set of linearized models and corresponding predictive control solutions. It has been produced by a well-known research leader in nonlinear predictive control, namely Alberto Bemporad and co-workers working with GM engineers. At the present time the details of the algorithm are a little sketchy because of commercial confidentiality but there are further details published in a SAE 2018 paper entitled: Model Predictive Control of Turbocharged Gasoline Engines for Mass Production.
Robust Control Systems
Ever since the early days of feedback control theory there has been an interest in improving the robustness of control systems. The well-known gain and phase margins were introduced to enable robustness to be assessed using a simple graphical method. Over the years many empirical or ad hoc methods have been developed to improve robustness and of course the Hinfinity control design theory was developed specifically to provide improved robustness for disturbance rejection and modelling uncertainties. This approach has had some success but is certainly not a panacea for the problem.
One of the other methods that was developed is that of quantitative feedback theory (QFT) which employs Nichols charts and also provides a visual way to assess robustness. One benefit over H? design is that the order of the controller can be pre-selected. If the order chosen is too small, then good performance will not be achievable so there is a compromise that is determined by the designer. With H? control the order of the controller depends upon the order of the system being controlled together with those of the cost weighting functions and disturbance models. Such controllers can be of high order leading to a high order Hinfinity controller.
Various MATLAB based control design toolboxes have been produced for QFT control system design and one of the most up to date is that due to Professor Mario Garcia Sanz. The QFT approach is easily understood by classically trained control engineers and provides a real intuitive understanding of the degree of robustness achieved. It is not so well known but there are a number of excellent text books on the subject including those by Professor Sanz and also by Rasmussan and Houpis.
If you would like to know more about the QFT design method or the software available we shall be pleased to put you in touch with Professor Sanz who is cooperating with the ACTC on the development of future training courses.
Rolling Mill Course
Some years ago the ACTC organised international rolling mill academies very successfully with strong industrial partnerships. In fact, some of the rolling mill academies were hosted by Alstom at Rugby and Pittsburgh. After the banking crisis there was not really a demand for these academies but over recent years there has been an increasing interest in such events. The ACTC and ISC have now produced a rolling mill training course that can be tailored to companies needs to be held over 2, 3 or even a 5 period. The courses mostly concentrates on hot strip mill control but they can also cover cold rolling mills both of a single stand and multi stand variety. Control problems in related areas can also be covered such as tinning lines and reheat furnaces. These courses can be run at company premises and in fact, the rolling mill academies were held around Europe and in the USA but the next event are likely to be held in Glasgow once sufficient companies have expressed interest. If you would like to register interest please contact Dr Meghan McGookin
Something for Nothing
It is always a great pleasure to get a bargain whether it is a new tie or a new vehicle. Control engineers can get a bargain by exploiting the models they obtain for fault monitoring and fault estimation purposes. It is now very common to use model based control design methods particularly for applications such as flight control systems. Whenever there is a manufactured product which sells in reasonable numbers it is worthwhile to develop high fidelity models to use in advanced control systems design. In fact, even if classical control methods are to be used good models are needed for simulations which can reduce commissioning time and enable robustness properties to be assessed.
It is in the exploitation of these models where bargains are to be found. That is, estimators can be produced which can be used for fault monitoring and detection purposes. In fact, quite a number of the fault monitoring methods depend upon observers or Kalman filter type solutions.
The models for systems can also be used in a more direct ways for condition monitoring. If a model is available of say a process line it can be used in real time for condition monitoring by feeding the model with the same signals the plant receives and comparing the plant responses with those of the model. This can be a surprisingly effective way of detecting the onset of fault or failure conditions. At the very least it can provide an early warning that there is an unexplained difference between the real plant measurements and those predicted from the model. This "recycling" of the model and simulation, to obtain a useful fault monitoring system, can be very beneficial when the product quality is all important.
Another quite different use of models and a simulation is to produce a training simulator. On a number of occasions at the end of projects rather than just leaving the simulation, having served its purpose for control design, companies have worked with ISC to produce a training facility for their engineers. This can provide hands-on experience for process operators or for the engineers that need to commission systems under tight time constraints.
The message is therefore do not waste all the work spent on models and simulations but think about other potential uses that may require little investment and provide a significant return.
New Journal Covering Advanced Control Applications
The international journal and book publishers Wiley are to publish a new journal covering industrial control applications. This will compliment Wiley's other journals covering areas such as nonlinear and robust control, adaptive control and signal processing, optimal control applications and methods. The guidelines for authors will be similar to those for the existing Wiley control journals regarding submission procedures but the content of the new journal will be focused on applications, demonstrating the benefits improved or advanced control can provide.
All areas of applications will be considered including process control, energy systems, automotive control, marine systems, aerospace and defence, and robotics and manufacturing. A typical paper for the journal will describe the physical problem, detail system models and will then describe the control design approach, including a summary of the underlying theory, followed by simulation results and if available the results of any application results. It is recognised that it takes some time for new advanced control methods to be implemented in real industrial systems, and hence most papers are likely to include simulation results, rather than plant test results.
All papers for the journal will be peer reviewed. If you have a potential paper in mind and would like further feedback you may contact Professor Michael Grimble
Data Driven Control Methods
The data driven control methods were introduced in the mid 1990's and there has been a steadily growing interest ever since. Most advanced control studies are based on the knowledge of modes derived from the physical dynamics of the system or obtained through system identification methods. Data driven control approaches enable controllers to be selected based purely on information obtained from raw measured plant input output data. The possible candidate controllers are designed based on assumed knowledge of the plant and disturbance models but then the selection of the best controller is only dependent upon measured data.
Professor Michael Safonov developed an approach for uncertain systems which provides data driven robust control laws.
To mark the 70th birthdays of Professor Michael Safonov the international journal of robust and nonlinear control is to publish a special issue reporting the state of the art in the subject. It will explain the principle of falsification which Professor Michael Safonov introduced as the basis of his selection algorithm. The guest editors of the special issue are Huiyu Gin, Margareta Stefanovic and Pietro Tesi.
Book Review: Model-Reference Adaptive Control: A Primer, by: Nguyen, Nhan T. Published By: Springer, Hardback Cost: £75.99, eBook Cost: £59.99
This text aims to provide a good working knowledge of adaptive control theory for applications. It is very relevant to engineers working in industry, since the author has tried hard to reduce excessive mathematics. The most popular adaptive control method in North America is model reference adaptive control. This text introduces model reference adaptive systems for both scalar and multivariable systems. It also covers least squares estimation methods that are valuable in adaptive control and other applications.
The introductory material includes nonlinear systems and methods of analysing stability based on Lyapunov theory. Robustness issues are also covered, including methods for coping with unstructured uncertainties. The material on robust adaptive control is particularly helpful, covering some very recent approaches. The material on aerospace applications mainly focuses on flight control systems but also provides useful evidence for more general applications. There may of course be other application areas which are likely to invest in adaptive control for new industrial systems but nevertheless the aerospace applications potential is interesting.
This is a subject where the reader can be overwhelmed by the mathematics and this text provides a refreshingly straightforward approach that should certainly be of value to engineers contemplating the introduction of adaptive features in different applications.
Book Nerd.
Book Review: Relay Tuning of PID Controllers for Unstable MIMO Processes, by: M Chidambaram and Nikita Saxena, Published By: Springer, Hardback: £92
This text on Relay Tuning of PID Controllers for Unstable MIMO Processes is in the Springer Industrial Monograph Series on Advances in Industrial Control. The authors are from the Department of Chemical Engineering in the Indian Institute of Technology in Madras. There are only a few Indian Institutes of Technologies that are all very prestigious institutions.
Relay auto tuning methods have become very popular in the process industries and are included in industrial products. This text introduces a new Ziegler-Nichols method for designing controllers for unstable open loop systems. The tuning of PID controllers for singe loop systems is relatively straight forward on many occasions but the tuning of controllers for multivariable systems is much more problematic. A relatively simple technique is described for tuning such systems.
In many process and control applications it is possible to buy commercial products for Autotuning but there are potential applications where bespoke or one off solutions are required, and the text will provide useful guidelines for engineers wishing to implement such a solution themselves.
One of the most difficult problems in control is ensuring stability and dealing with uncertainties. These questions are addressed and the more practical design aspects. The approach can be used with some of the auto-tuning systems available, which considerably widens the range of potential applications for this approach.
The text is very accessible to engineers and has numerous examples. The emphasis is on engineering rather than mathematics. It should be useful to engineers in industry and to students studying control applications and design techniques.
Book Nerd.
Book Review: Stability and Performance of Control Systems with Actuator Saturation by: Li, Yuanlong, Lin, Zongli, Published By: Springer, Hardback Cost: 114.39 euro, eBook Cost: 91.62 euro
A saturation function is probably the most common nonlinearity that a control engineer needs to accommodate. These might be present due to the dynamics of actuators or they could be imposed by the controller itself to ensure current or voltage limits do not exceed certain levels. In either event the effect of clipping the control action is similar, and this distortion of the control action can cause very poor performance or instability.
The text provides a very mathematical treatment of the problem and it would have been nice to have seen much more on classical methods of solving the problem, even if these are pragmatic rather than scientific. The initial chapters introduce the mathematics needed and useful topics such as the use of piecewise linear functions in modeling and there is also a discussion of the optimization problems required. The chapter on Lyapunov functions may be of value to students and the chapter on disturbance rejection treated an important topic. This text is of most value to researchers in University groups that are working on nonlinear systems.
Book Nerd.
Contents
Model Predictive Control for Automotive Systems
ACTC News
- ISC presenting Nonlinear MPC for Marine Renewables at All Energy Conference
- Matlab Toolbox on NGMV Control
- Forthcoming ISC Training Training Courses
- Predictive Control Using Production Engines for GM
- Robust Control Systems
- Rolling Mill Course
- Something for Nothing
- New Journal Covering Advanced Control Applications
- Data Driven Control Methods
- Book Review: Model-Reference Adaptive Control: A Primer
- Book Review: Relay Tuning of PID Controllers for Unstable MIMO Processes
- Book Review: Stability and Performance of Control Systems with Actuator Saturation
Forthcoming ISC/ACTC Events
Early Bird Discounts Avaliable
We are offering an "Early Bird Discount" if registration is received 2 weeks before the course start date (see online registration form). Employees of ACTC member companies are entitled to two places free of charge. Note that all courses offered can also be provided at your company premises through special arrangements, please contact us for more information.
