E-News March 2016 Edition
Advanced Control for the Metal Processing Industries by Professor Mike J Grimble

There are many areas where improved modelling and simulation, and advanced control can play an important role in metal processing systems. For example, H infinity robust control has considerable potential for use in tandem mills to provide high performance and low-interacting behaviour whilst maintaining consistent performance. There is significant potential to improve product quality and provide a measure of robustness in the presence of disturbances and uncertainties. The approach provides excellent multivariable control action when models are well known and it also provides insensitivity to modelling errors when robust control design procedures are used.
One of the most exciting areas is in the use of predictive control for the supervisory level of hot or cold tandem rolling mills. For example, by distributing the load down the stands of a mill appropriately so called flatness or shape can be controlled indirectly. This avoids the requirement for shape meters which are of course expensive and can be difficult to fit where they are actually needed.
If shape or flatness meters are available then much improved flatness control can be achieved particularly applying modern model based multivariable control methods. The great potential in Sendzimir mill stainless steel cold rolling mill control has for example been demonstrated using LQG and H infinity robust control methods.
There are also more specialist rolling mill problems where advanced control can provide a significant advantage. For example, the problems of backup roll eccentricity, due to rolls not being exactly circular, are of course well known. Unfortunately, classical methods of thickness control can often amplify the so-called eccentricity effect. Model based control methods enable the possible presence of eccentricity to be taken into account and even cancelled. There may not of course be exact cancellation but classical control schemes can lead to over rolling the eccentricity (i.e. making it worse). There is therefore much to be gained from advanced control methods such as dynamically weighted robust LQG design.
One of the other problems which limits the quality of rolled product is the presence of nonlinearities. If these are not dealt with directly they can provide the major limiting factor that determines the quality of rolled product and overall system performance. One example is the control of the looper arms in hot strip mills, which can be a very nonlinear system. Great advances have been made in recent years in the development of relatively simple nonlinear multivariable stochastic and robust control methods. Some of the improvements have stemmed from developments in other industries, such as the automotive industry. For example, nonlinear predictive control is of particular interest in the automotive industry for power train control, driven by the need to reduce emissions and fuel consumption. Another relatively new research and development area which is likely to have a significant effect on metal processing applications is that of condition monitoring, fault monitoring and detection systems. A related area is that of performance and controller benchmarking, where the quality of product, or of control action, is assessed. Most of the new condition monitoring and fault detection method or benchmarking techniques utilise model based methods. In fact, the trend in industry is towards the greater use of models, for simulation, monitoring systems and control design. A natural next step will be to apply integrated control design and condition monitoring tools.Mike Grimble
Floating Wind Turbines
There is always a question of where to place wind turbines in wind farms both onshore and offshore. The question is slightly more complicated if the wind turbines involved are floating because of the additional motions involved. A recent study was commissioned by Nagasaki University in Japan to investigate this problem and to provide recommendations on the space in between offshore floating wind turbines taking into account issues such as the wake effects between turbines. ISC was chosen for this project because of its experience gained on the European Union supported project Aeolus which involved fixed structure offshore wind farms. In fact, one of the ACTC training courses covers this topic. This was in fact one of the obligations of the EU project to widely disseminate the general results obtained.
Multivariable Control for All
It does not seem that long ago, but it probably was, when real multivariable control was not available except for systems of the lowest order. We now take it for granted that full dynamic multivariable control is available but many systems are still designed using techniques which mostly ignored the dynamics of the process. For example, in days gone by static compensating was used within roll mill control systems to try to remove much of the interaction. In the chemical and process industries Ed Bristol's relative gain array was often used to help engineers design essentially single loop controllers for a system that was inherently multivariable.
In today's world we do of course have Matlab, Matrix X, LabVIEW and other tools which enable true dynamic compensation to be used often based upon optimal control methods.
Many of the predictive control techniques are based upon optimisation and these probably provide the most common advanced multivariable control solution particularly for the process industries but increasingly for systems where machinery dominates such as automotive engine controls.
One of the main reasons for considering the use of multivariable control is that performance can be severely limited if only single loop techniques and static compensation are applied. Thus in a servo system accuracy can be comprised and in a process plant energy costs can be higher or product quality reduced.
A problem that sometimes arises is that the general multivariable control tools available do not really fit the particular application of interest. In this case a more bespoke solution is required. The parent company of the ACTC, namely ISC Ltd., has had much experience in developing tailored solutions to multivariable control problems and will gladly advice on what tools, products or techniques may be suitable. For further information contact Dr Andrew Clegg.
Training Course Trends
The delivery of training courses has changed considerably since the early days of the ACTC programme. Most courses are now presented at company premises rather than in central locations for all ACTC members. Courses are also often tailored to the application area of most interest.
Another Trend that has emerged, which has been very successful, has been the use of very detailed design studies so that instead of having hands-on examples based upon rather academic examples much longer and detailed design of studies on real applications have been introduced. For example, a training course on the use of advanced controls for diesel engines includes fairly detailed simulation and design studies. All companies receive copies of the simulations and control design solutions as part of the course deliverables.
The ACTC has of course amassed a rich store of training course material during its two decades of existence. It has a huge library of training courses and hands-on material which reduces costs. Thus if companies require either basic or advanced training in well-known topics like robust control or Kalman Filtering then material will be available and this keeps the cost of courses down. In some cases companies require very industry specific in-house training support and hence very specialist courses have been developed for areas like hot and cold rolling mills, wind turbine and wind farm controls, offshore oil production platform controls, automotive engine controls and robust controls for aerospace systems.
Any company interested in potential training can seek advice from the ACTC and a recommended course agenda will be provided with no obligation. Further details may be obtained from Dr Meghan McGookin.
New Research Projects on Control Performance Monitoring (CPM) and Training Simulators
ISC has been awarded two Eurostars grants which provide funding for collaborative research and development projects between European SMEs.
The first is called "SmartCPM" which is looking at control performance monitoring (CPM) for more demanding industrial processes, such as metals processing. These processes have features that complicate the deployment of current commercial CPM used typically in the refining and petrochemicals industry. These features include high data rates, semi-batch operation with many product grades, strong loop interactions, and complex control architecture that include conservation of mass constraints.
The project partners are ISC in the UK and Asinco and iba AG in Germany, both of whom work extensively in the metals processing industry. It is intended that the work here will also extend to other industrial processes that could benefit from more specialised CPM, such as power generation, paper manufacturing and glass manufacturing.
The second Eurostar's project sees ISC collaborating with two Norwegian companies, PaleBlue www.paleblue.no and the Norwegian School of Commercial Diving (NYD). This project will look at developing a new class of training simulator for the operators of industrial saturated diving systems. The intention is to create a system that operators can experience highly realistic normal and abnormal scenarios, to prepare them for real situations. The simulator will combine photo-realistic imagery, diver audio and real time dynamic process simulations.
If you want to know more about this then please contact Andy Clegg
New Pharmaceutical Process Training Simulator
ISC has been working with CPI Biologics (Centre for Process Innovation) to develop
a new modular training simulator ultimately for use with the next generation of pharmaceutical processes. The
prototype training simulator has been developed entirely in LabVIEW, making extensive use of CD&SIM for the
nonlinear dynamic simulation of the biological process. The use of LabVIEW will facilitate the interfacing
to real laboratory scale processes if required to enhance the training experience. 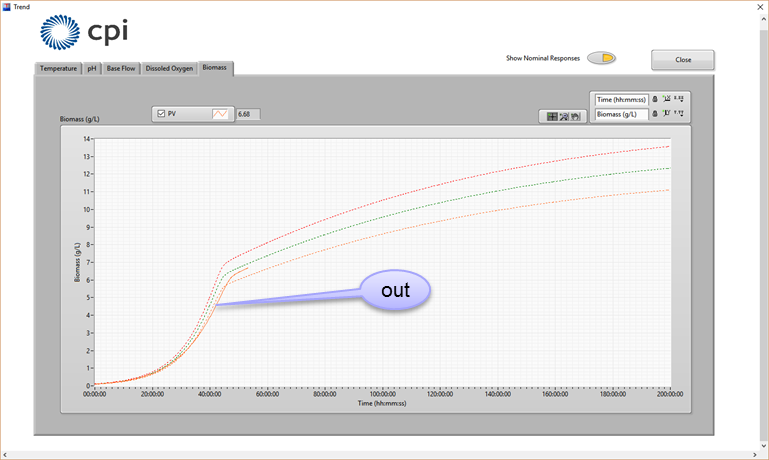
The prototype system provides an instructor interface where the training scenarios can be defined, in terms of what faults to introduce (e.g. pH probe drift, limited biological growth). These scenarios include an element of randomness so that the trainees don't get repeated scenarios. The trainee works with a view of the simulated process that they would expect on a real plant, including the ability to manually instigate tests to diagnose faults (as would be for a real process). There is the ability to overlay a nominal trend to help the trainee spot the deviation and help the learning experience. A record of the trainees' actions is recorded for review with the instructor.
If you want to find out more about this, then please contact Andy Clegg
Engine Controls
The Volkswagen debacle has brought the importance of high quality engine controls to the world's attention. There is an obvious need to reduce emissions and improve fuel economy which is an equally important objective. The parent company of the ACTC, Industrial Systems & Control Ltd., has been working with the University of Strathclyde's Industrial Control Centre and with General Motors in Warren, Michigan for about 15 years on various investigations on the role that advanced controls can play in automotive engine control. The initial links with GM were created through academic links with the University and in recent years they have matured into the existing links through ISC so the advanced control algorithms could be evaluated in more realistic test scenarios including vehicle test-track assessments.
Potential for Adaptive Systems
There is considerable potential for adaptive control and signal processing methods. Advances in software techniques and in computing power provide some of the necessary tools to enable a breakthrough in technology to be achieved. Unfortunately, theoretical advanced in adaptive control or in adaptive estimation have not really progressed at the same speed. What engineers think of as adaptive control systems really date back a couple of decades at least as regards the basic ideas?
This might also be said of auto tuning methods which provide an automatic controller tuning capability. However, at least in the case of auto tuning there has been wide acceptance in industry and the various methods have been improved in the light of industrial experience. This is not really true for adaptive systems where progress has been painfully slow in industrial applications and other application areas.
The good news is that this provides a great opportunity for both new theoretical and practical advanced.
It is of course true that many papers on adaptive control and signal processing have been published in recent times but for whatever reason the techniques described have not caught the imagination of engineers in industry. Most of the adaptive methods developed are of course universal solutions to general control problems and it may be that this is too loftier a goal. Simpler and more practical adaptive systems might be those that only applying special cases by exploiting the structure of the application involved. Since such solutions are not generally applicable they are not so interesting from an academic research perspective but they may be more useful to society.
An adaptive system of the future may remove much of the stress in designing new control systems and be able to count for changing conditions and uncertainties in a robust and reliable manner. The promise of such systems is therefore great and if a breakthrough can be made which is soundly based and practical to implement then it will revolutionise both the design and the commissioning of industrial controllers.
Versatility of Extended Kalman Filtering
The extended Kalman filter (EKF) is very similar to the traditional Kalman filter but it can be used on nonlinear systems having a state representation. The main difference is that the gain calculation depends up on linearization about the current state estimate and control signal values. Thus for operation on a nonlinear system the gains are recalculated at each sample instant but otherwise the feedback structure is similar to that for a linear Kalman filter. That is, it includes the plant model with a feedback loop around it.
Although the EKF was developed for nonlinear systems it can easily be made to estimate states in such systems and also unknown parameters. It can therefore do simultaneous state and parameter estimation. It is certainly true that by trying to get it to do both duties it becomes less reliable and more subject to divergence but it has been used successfully on applications such as ship positioning systems where the parameter to be estimated is the wave dominant frequency.
Another and growing area is that of condition monitoring and fault detection. In this case the EKF can be used in two different modes. If a fault corresponds with excessive changes in a system parameter then this parameter can be estimated and used as an indicator of fault conditions. Another possibility is to use the EKF to compute the so called residual signal obtained from the difference of the observations and the predicted output. In a typical situation under normal conditions this should be white noise but in fault conditions a definitely bias occurs and this could be used as an indicator of a possible fault condition. There is of course always the problem of deciding whether such a signal is sufficiently large to indicate a real fault.
Probably the most useful and reliable way of using the EKF is part of a state estimate feedback control system. The structure would appear similar to that for linear system using a linear quadratic Gaussian (LQG) controller. The only difference is the control gain is fed with state estimates from the EKF and it is the EKF that mainly compensates for the nonlinear system effects. Higher performance could probably be obtained by using gain scheduling for the control gain but this may not be necessary.
The EKF is therefore a versatile and useful method that should be available in the control designer's toolbox.
Why Does PID Control Work?
The proportional, integral, derivative (PID) controller might be termed Mother Nature's controller, in that it seems to work in most circumstances with very little effort. To explain why this is the case first consider the integral term. The disturbances in most systems are low frequency or even constant disturbance effects and therefore integral action is very often desirable. However, an integrator has 90 degrees phase lag and since most systems are low pass too much phase lag is destabilising or at least leads to poor transient responses. Thus although integral action is desirable at low frequencies it is not so helpful at medium frequencies or high frequency. The addition of a proportion term enables what amounts to a lead term to be introduced at mid-frequency so that the integral action effectively stops at mid and high frequencies. The result is that the negative phase shift is not increased so much particularly in the mid-frequency region where the unity gain cross over frequency is found. It is in this region that transient stability properties are determined.
A derivative term is not often used but it can be helpful since it provides phase advance to counter the negative phase shift of the plant. Unfortunately, derivative action leads to measurement noise amplification and hence a filter on derivative action is always required. In any event high gain at high frequency is not usually desirable because of uncertainties. For example, high frequency resonances can be excited leading to fatigue problems in structures.
Thus a PID controller with a filter derivative action has a very natural characteristic of increasing low frequency gain for disturbance rejection and tracking, and providing positive face shift in the mid frequency range, where transient response characteristics must be changed. It is true that without the derivative filtering such controllers are physically unrealistic but otherwise the characteristic is what is required for many systems.
A benefit of the PID controller which is not obvious at the outset is that it can be very robust. Because it is a low order controller changes in plant characteristics often do not change the loop transfer function so significantly as with high order controllers. These attempt to introduce fancy gain and phase manipulation. Thus what might appear to be a limitation, namely the low-order nature is also a benefit. A more obvious advantage is the simplicity of tuning. In many applications there is only the proportional and integral term and it is therefore often relatively easy to tune these gains to obtain reasonable responses. For example, if high accuracy is required and faster speed then clearly the total gain of the controller needs to be increased and once the system has achieved roughly the speed of response/bandwidth requirements the exact nature of transient responses can be changed by varying the relationship between the proportional and integral gain terms. A model of the system is not therefore required in PID control which is often an advantage.
It therefore seems that the PID controller is Mothers Nature gift to us all.
Academic / Industrial Cooperation
There are many opportunities for cooperation between industry and academia provided by the Engineering and Physical Sciences Research Council (EPSRC) and also by the various research funding programs available through the European Union, amongst others. Some of the funding is to enable basic research to be undertaken but there is also funding to enable products to be developed from the results of the research activity.
The EPSRC also has special programs to help develop particular industrial sectors and for example renewable energies had a high priority over the last decade. One of the most interesting and valuable areas is that of health care where control and signal processing methods are now providing valuable new solutions.
It is normally the case that the Engineering Heads and Deans in local Universities will have the information on of these schemes but if you need further help contact Professor Mike Grimble
Book Review:Iterative Learning Control, an Optimization Paradigm, by David H. Owens, Published By: Springer, Cost: £97
This new text is in one of the areas that may be most useful in industrial applications in future years. Professor Owens from the University of Sheffield has had a long career leading the development of design methods that are needed in industrial applications. His early work was on frequency domain design approaches but in recent years he had focused upon repetitive operations via his interests in multi-pass processes, repetitive control and iterative learning control.
The general area of multipass systems covers applications such as automated ploughing in agriculture. The aim is of course to have a sequence of furrows that replicate themselves from pass to pass with little error. Another example is in automated coal cutting which is one of the first areas of multi-pass processes that was considered. In this application once a pass along the coal face has been completed the cutting machinery is moved forward to sit on the bed of rock revealed by the cut. The process is then repeated giving rise to the term multi pass process.
There are also applications in metal processing, where metal strip is successively reduced in
thickness and where the outcomes of the current pass affects the outcome of the following thickness
reduction process. The idea of introducing learning seems of course very logical, since what is
happening on the current pass of a process provides information for any following activity.
Iterative learning control can be introduced effectively in a wide range of applications including:
Manufacturing robotics, rotating machines, mechanical tests systems and rehabilitation robotics,
the aim of a control system must of course be to provide a sequential improvement in tracking
accuracy using data recorded during each execution of the task involved.
The book by Professor David Owens provides an approach to iterative learning control using optimisation techniques that relate closely to familiar optimal control methodologies. The text covers methods of incorporating input and output constraints and techniques to enable the algorithms to reconfigure themselves, systematically, to meet the requirements of different reference signals. The text concentrates on algorithm development but the ideas are presented in a design context that relates performance to the choice of parameters and underlying plant dynamic properties.
This is a seminal text since it is very likely to generate interest and enthusiasm in the whole topic, and it provided a comprehensive overview of the mathematical methods that can be applied. It is very suitable for researchers in advanced control but it will also be useful to engineers involved with multi pass or repetitive processes where learning can provide a substantial improvement.
Book Nerd.
Book Review: Assessment and Future Directions of Nonlinear Model Predictive Control, By: Findeisen, Rolf, Allgöwer, Frank, Biegler, Lorenz (Eds.), Published by: Springer, Cost: £166
Some new texts are more noteworthy that others and this falls in the former category as being important. The cost is £166 for the softcover version but the eBook version is rather less. This is a very comprehensive overview starting with the foundations and history of nonlinear model predictive control (NMPC). It then deals with the many aspects of the synthesis and design problem through contributions from very distinguished researchers.
It is a wide ranging text covering such areas as hybrid systems, constrained control, LPV systems, nonlinear discrete-time systems and many others. One of the important topics when implementing such methods is that of numerical simplicity and efficiency. There are also many questions regarding the convergence and stability of algorithms and these topics are all covered in some detail. The book also covers the very important area of robustness and robust control design, in the presence of uncertainty due to unmodelled dynamics, parameter variations and disturbances.
An important part of most nonlinear MPC designs is the state estimator involved and this is also covered. Many areas of applications are discussed, particularly in process control and in fast systems. The latter is particularly important for fast applications such as automotive, robotics and servo systems. Important application areas in flight control and aerospace are also covered.
This is a valuable contribution to the subject and is suitable for researchers and engineers involved in all aspects of nonlinear MPC design and implementation.
Book Nerd
Book Review: Stability Analysis of Nonlinear Systems - Second Edition, By:By: Srinivasa Leela, Vangipuram Lakshmikantham and Anatoly A. Martynyuk, Published By: Birkhäuser, Cost: £71
This text is published by Birkhäuser in the systems and control series. The stability of nonlinear systems is more problematic than that of systems which are dominantly linear. Much of the text involves lyapunov methods applied to a wide range of nonlinear problems.
This is a mathematical treatment of the subject rather than an engineering design approach but it does cover a very wide range of useful topics. There is for example a chapter concerning robotics applications where nonlinearities dominate. The stability of coupled lasers is also considered and some discussion of impulsive systems.
The text is of most value to academics, researchers and students working in nonlinear systems.
Book Nerd
Contents
Advanced Control for the Metal Processing Industries by Professor Mike J Grimble
ACTC News
- Floating Wind Turbines
- Multivariable Control for All
- Training Course Trends
- New Research Projects on Control Performance Monitoring (CPM) and Training Simulators
- New Pharmaceutical Process Training Simulator
- Engine Controls
- Potential for Adaptive Systems
- Versatility of Extended Kalman Filtering
- Why Does PID Control Work?
- Academic / Industrial Cooperation
- Book Review:Iterative Learning Control, an Optimization Paradigm, by David H. Owens, Published By: Springer, Cost: £97
- Book Review: Assessment and Future Directions of Nonlinear Model Predictive Control, By: Findeisen, Rolf, Allgöwer, Frank, Biegler, Lorenz (Eds.), Published by: Springer, Cost: £166
- Book Review: Stability Analysis of Nonlinear Systems - Second Edition, By:By: Srinivasa Leela, Vangipuram Lakshmikantham and Anatoly A. Martynyuk, Published By: Birkhäuser, Cost: £71
Forthcoming ISC/ACTC Events
Early Bird Discounts Avaliable
We are offering an "Early Bird Discount" if registration is received 2 weeks before the course start date (see online registration form). Employees of ACTC member companies are entitled to two places free of charge. Note that all courses offered can also be provided at your company premises through special arrangements, please contact us for more information.
- Training Course: Linear and Nonlinear Predictive Control, 10th - 11th May 2016, Glasgow
- Training Course: Control Fundamentals, 13th - 15th September 2016, Glasgow
- Training Course: Introduction to Estimation and Kalman Filtering, 22nd November 2016, Glasgow
- Training Course: Nonlinear Control Systems, 23rd November 2016, Glasgow
Other Events of Interest
- External Event: 2016 American Control Conference, 6-8 July 2016, Boston
- External Event: Control 2016 - 11th International Conference on Control, 31st August - 2nd September 2016, Belfast
- External Event: Renewable Power Generation, 21st - 23rd September 2016, London
